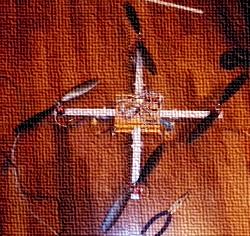
Un cuadricoptero es una máquina voladora capaz de moverse únicamente por el empuje de sus cuatro motores. No tiene alas ni superficies de control, por lo que la estabilidad y la maniobrabilidad se consiguen utilizando un sistema de control que mide continuamente las aceleraciones, ángulos y velocidades angulares de la estructura y modifica de acuerdo …